ΓΈGDC SummerΓœΓ÷Star Wars ΞΗΞßΞάΞΛΓßΞ’Ξ©ΓΦΞκΞσΓΠΞΣΓΦΞάΓΦΓΉΛΥΛΣΛ±Λκ ΣΆΐΞΔΞΥΞαΓΦΞΖΞγΞσΛΈΦ¬ΝθΦξΥΓ
- ΞΤΞ·ΞΈΞμΞΗΓΦ
- ≥Ϊ»·
- ΞΔΓΦΞ»
- ΞΔΞΥΞαΓΦΞΖΞγΞσΖœ
- ΞΛΞΌΞσΞ»ΞλΞίΓΦΞ»
- ΞβΓΦΞΖΞγΞσΚνά°
- ΣΆΐ±ιΜΜ
- ΞΛΞΌΞσΞ»
- Game_Developers_Conference
 |
ΓΓ…°Φ‘Λ§Εα«·ΓΛΛΝΛγΛΠΛ…¥ΊΩ¥Λρ ζΛΛΛΤΛ≠ΛΩΒΜΫ―ΞΤΓΦΞόΓ÷ΦΓάΛ¬εΞ≤ΓΦΞύΛΥΝξ±ΰΛΖΛΛΞΔΞΥΞαΓΦΞΖΞγΞσΞΖΞΙΞΤΞύΓΉΓ ¥ΊœΔΒ≠ΜωΓΥΛΥΛΡΛΛΛΤΦηΛξΑΖΛΟΛΤΛΛΛΩΞΜΞΟΞΖΞγΞσΛ§ΛΔΛΟΛΩΛΈΛ«ΥήΙΤΛ«Ψ“≤πΛΖΛΩΛΛΓΘ
ΓΓΞΩΞΛΞ»ΞκΛœΓ÷Physical Animation in Star Wars JediΓßFallen OrderΓΉΓ Γ÷Star Wars ΞΗΞßΞάΞΛΓßΞ’Ξ©ΓΦΞκΞσΓΠΞΣΓΦΞάΓΦΓΉΛ«ΚΈΆ―ΛΖΛΩ ΣΆΐΞΔΞΥΞαΓΦΞΖΞγΞσΓΥΛ«ΓΛΞΩΞΛΞ»ΞκΛΈΛ»ΛΣΛξΓΛPlayStation 4ΓΛXbox OneΓΛWindows PCΛ«»·«δΛΒΛλΛΩΞΙΞΩΓΦΓΠΞΠΞ©ΓΦΞΚΛΈάΛ≥Π¥―ΛΈΜΑΩΆΨΈΜκ≈άΞΔΞ·ΞΖΞγΞσΞΔΞ…ΞΌΞσΞΝΞψΓΦΓ÷Star Wars ΞΗΞßΞάΞΛΓßΞ’Ξ©ΓΦΞκΞσΓΠΞΣΓΦΞάΓΦΓΉΓ Α ≤ΦΓΛSWJFOΓΥΛΈΞΔΞΥΞαΓΦΞΖΞγΞσΞΖΞΙΞΤΞύΛρ≤ράβΛΖΛΩΞΜΞΟΞΖΞγΞσΛΥΛ ΛκΓΘ
 |
±ιΒΜΛΈΚΤάΗΛάΛ±Λ«ΛœΓ÷…βΛΛΛΤΛΖΛόΛΠΓΉΞ≤ΓΦΞύΤβΞ≠ΞψΞιΞ·ΞΩΓΦΛΈΤΑΛ≠
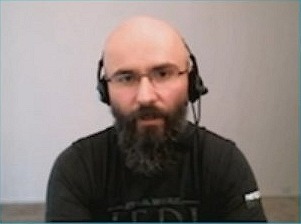
ΓΓΥήΙΤΛΣΛηΛ”≈ω≥ΚΞΜΞΟΞΖΞγΞσΛ«Ά―ΛΛΛιΛλΛκΓ÷ΞΔΞΥΞαΓΦΞΖΞγΞσΓΉΛ»ΛΛΛΠΆ―ΗλΛœΓ÷Ξ≠ΞψΞιΞ·ΞΩΓΦΛ Λ…ΛΥΤΑΛ≠ΛρΛΡΛ±ΛκΛ≥Λ»ΓΉΛΈΑ’Λ«Ά―ΛΛΛιΛλΛΤΛΛΛκΓΘΤϋΥήΛ«ΛœΓ÷ΞβΓΦΞΖΞγΞσ…’Λ±ΓΉΛ»ΛΛΛΟΛΩΛέΛΠΛ§ΤκάςΛΏΛδΛΙΛΛΛΪΛβΛΖΛλΛ ΛΛΓΘ
ΓΓΞ≤ΓΦΞύΛΥΛΣΛ±ΛκΞΔΞΥΞαΓΦΞΖΞγΞσΫηΆΐΛΥΛΡΛΛΛΤΛœΓΛΞφΓΦΞΕΓΦΛΈΧήΛ§»νΛ®ΜœΛαΛΤΛΣΛξΓΛΛ≥ΛλΛόΛ«ΛΈΛδΛξ ΐΛ«ΛœΞ≤ΓΦΞύΞΉΞλΞΛ¬ΈΗ≥Λ§Γ÷ΛΖΛγΛήΛΛΓΉΛ»ΗάΛοΛλΛκΒΓ≤ώΛβΝΐΛ®ΛΤΛ≠ΛΩΓΘΛβΛΝΛμΛσΓΛΫΒΩΞκΞαΞΩΞΟΞΝΛΈΞ≤ΓΦΞύ±«ΝϋΛ«ΛœΛΫΛΠΛ«ΛœΛ ΛΛΛΪΛβΛΖΛλΛ ΛΛΛ§ΓΛΨ·Λ Λ·ΛβΞξΞΔΞκΜ÷Ηΰ…ΫΗΫΛδΞ«ΞΘΞΤΓΦΞκ…ΫΗΫΛρΫ≈ΜκΛΖΛΩΞ≤ΓΦΞύΛ«ΛœΓΛΛΩΛά«υΝ≥Λ»Γ÷ΜωΝΑΛΥΧρΦ‘Λ Λ…ΛΈάΗ±ιΒΜΛρΒ≠œΩΛΖΛΤά©ΚνΛΖΛΩΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΞ«ΓΦΞΩΛρΚΤάΗΛΖΛΤΞ≠ΞψΞιΞ·ΞΩΓΦΛρΤΑΛΪΛΙΓΉΛ»ΛΛΛΠΦξΥΓΛ«Λœ…‘ΫΫ §ΛΥΛ ΛΟΛΤΛΛΛκΛΈΛάΓΘ
ΓΓWaszakΜαΛ§Κ«ΫιΛΥΗΪΛΜΛΩΛΈΛœΓΛΥήΚνΛΥΛΣΛ±ΛκΞΕΞ≥≈®Λ»Λ ΛκΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛ§ΛδΛιΛλΛΩΛ»Λ≠ΛΥΞΔΞΥΞαΓΦΞΖΞγΞσΛάΓΘ
 |
ΓΓΚΗ¬ΠΛœΓ÷ΛδΛιΛλΨθ¬÷ΓΉΛΈ±ιΒΜΛΈΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΞ«ΓΦΞΩΛρΛΫΛΈΛόΛόΚΤάΗΛΖΛΤΛΛΛκΛάΛ±ΛΈΨθ¬÷ΛάΓΘ«ΊΗεΛΥΛΔΛκ …ΛΈ¬ΗΚΏΛρΧΒΜκΛΖΛΤΞΔΞΥΞαΓΦΞΖΞγΞσΛΖΛΤΛΛΛκ¥ΊΖΗΛ«Ω»¬ΈΛΈ…τΑΧΛδ±ΠΦξΛΥΜΐΛΟΛΤΛΛΛκέΰΥάΛ§ …ΛΥΛαΛξΙΰΛσΛ«ΛΖΛόΛΟΛΤΛΛΛκΓΘ
ΓΓΑλ ΐΛ«±Π¬ΠΛœΦΰΑœΛΈ …Λ»ΛΈ≈ωΛΩΛξ»ΫΡξΛΥ«έΈΗΛΖΓΛΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΞΌΓΦΞΙΛΈΞΔΞΥΞαΓΦΞΖΞγΞσΛΥΙ¥¬ΪΛρΆΩΛ®ΛΤΤΑΛ≠Λρά©Η¬ΛΙΛκΛ≥Λ»Λ«Ω»¬ΈΛΈ…τΑΧΛδέΰΥάΛΈ …ΛΊΛΈΛαΛξΙΰΛΏΛρ≤σ»ρΛΖΛΤΛΛΛκΆΆΜ“Λ§ §ΛΪΛκΓΘ
ΓΓΛ…ΛΝΛιΛ§ΧΞΈœ≈ΣΛ ΞΔΞΥΞαΓΦΞΖΞγΞσΛΪΓΛΛΔΛκΛΛΛœΛ…ΛΝΛιΛ§Ξ≤ΓΦΞύάΛ≥ΠΛΥάβΤάΈœΛ§ΛΔΛκΞ≠ΞψΞιΞ·ΞΩΓΦΒσΤΑΛΪΛœ≤ΰΛαΛΤΧδΛΠ…§ΆΉΛβΛ ΛΛΛάΛμΛΠΓΘ
SWJFOΛΥΛΣΛΛΛΤΚΈΆ―ΛΖΛΩΓ÷ΜωΝΑά©ΚνΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛρΆΜΙγΛΒΛΜΛκΓΉΛΩΛαΛΈΞΤΞ·ΞΥΞΟΞ·Λ»ΛœΓ©
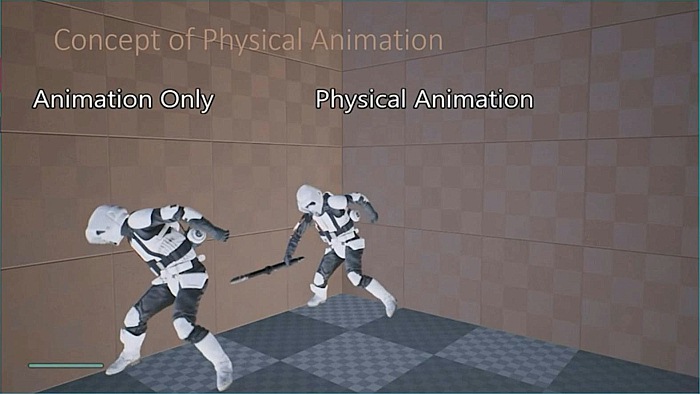
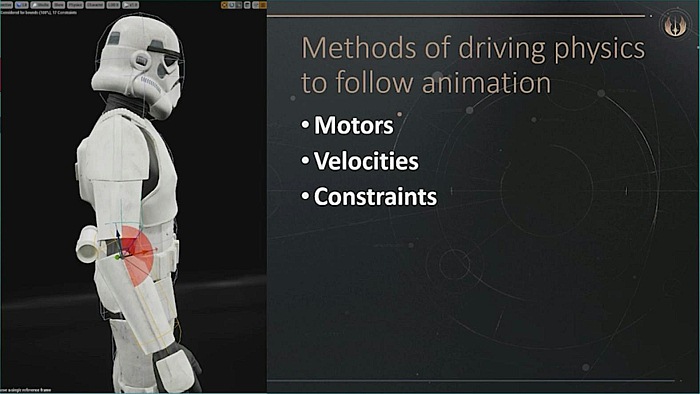
ΓΓWaszakΜαΛΥΛηΛκάβΧάΛ«ΛœΓΛSWJFOΛΥΛΣΛ±ΛκΓ÷ΜωΝΑά©ΚνΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛρΆΜΙγΛΒΛΜΛκΛΩΛαΛΈΦξΟ ΓΉΛ»ΛΖΛΤΓΛ3ΛΡΛΈΞΔΞΉΞμΓΦΞΝΛρΚΈ¬ρΛΖΛΩΛ»Ϋ“ΛΌΛΤΛΛΛκΓΘΛ ΛΣΓΛΨοΛΥ3ΛΡΝ¥…τΛρ≥ηΆ―ΛΖΛΩΛ»ΛΛΛΠΛ≥Λ»Λ«ΛœΛ Λ·ΓΛΤΑΛ≠ΛρΛΡΛ±ΛκΞΣΞ÷ΞΗΞßηλà ΛΩΛ»Λ®Λ–Ξ≠ΞψΞιΞ·ΞΩΓΦΓΥΛ¥Λ»ΛΥ≈§ΒΙΓΛΛ…ΛλΛΪΓ ΛΔΛκΛΛΛœ ΘΩτΓΥΛρΦηΦΈΝΣ¬ρΛΖΛΤΚΈ¬ρΛΖΛΩΛ»ΛΛΛΠΛ≥Λ»ΛάΓΘ
 |
ΓΓ1ΛΡΛœΓ÷MotorsΓΉΓ ΞβΓΦΞΩΓΦΓΥΛάΓΘ
ΓΓΛ≥ΛλΛœΓΛ¥ΊάαΓ JointΓΥΛ»ΛΛΛΠ¬Ϊ«ϊΛρΆΩΛ®ΛΩΨρΖο≤ΦΛ«ΤΑΛ≠ΛρΆΩΛ®ΛκΞΔΞΉΞμΓΦΞΝΛάΓΘ¥ΊάαΞΌΓΦΞΙΛ«ΤΑΛ≠ΛρΆΩΛ®ΛκΓΛΛΛΛοΛφΛκΞ≠ΞΆΞόΞΤΞΘΞΟΞ·ΞΙ≈ΣΛ ΞΔΞΉΞμΓΦΞΝΛ»¥ΙΗάΛ«Λ≠ΛκΓΘ
ΓΓΛΩΛ»Λ®Λ–ΓΛΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΛΥΛηΛΟΛΤΤάΛιΛλΛΩ±ιΒΜΞ«ΓΦΞΩΛΈ…Σ¥ΊάαΛΈ≤σ≈ΨΓ ΞβΓΦΞΩΓΦΕνΤΑΓΥΛ§ΚΗ≤σ≈ΨΛάΛΟΛΩΛ»ΛΖΛΤΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΛΪΛιΓΛΛ≥Λ≥ΛΥΛΒΛιΛ ΛκΚΗ≤σ≈ΨΝΐΕ·Λ§Β·Λ≥ΛξΛ®ΛκΛ»ΛΖΛΩΛιΚΗ≤σ≈ΨΛΈΞβΓΦΞΩΓΦΕνΤΑΛρ¬°ΛαΛκΖκ≤ΧΛρΆΩΛ®ΛκΛ≥Λ»ΛΥΛ ΛκΓΘΒ’ΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΛ§ΓΛΛ≥Λ≥ΛΥΒ’ΛΈ±Π≤σ≈ΨΛΈΈœΛρ≤ΟΛ®ΛκΛβΛΈΛάΛΟΛΩΨλΙγΓΛΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΛΥΛηΛΟΛΤΤάΛιΛλΛΩ±ιΒΜΞ«ΓΦΞΩΛΈ…Σ¥ΊάαΛΈΚΗ≤σ≈Ψ±ιΒΜΛΥΞ÷ΞλΓΦΞ≠Λρ≥ίΛΪΛκΛ≥Λ»ΛΥΛ ΛκΛάΛμΛΠΓΘΛΫΛσΛ ΞΛΞαΓΦΞΗΛάΓΘ
ΓΓ2ΛΡΛαΛœΓ÷VelocitiesΓΉΓ ¬°≈ΌΓΥΛ«ΛΔΛκΓΘ
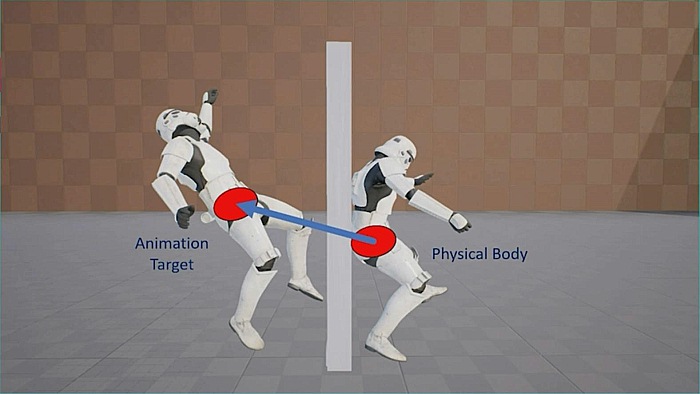
ΓΓΛ≥ΛλΛœΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΛ«ΤάΛιΛλΛΩ±ιΜΜ¬–ΨΈ ΣΛΈ¬°≈ΌΛΈ ―≤ΫΛρΓΛΜωΝΑά©ΚνΛΖΛΩ±ιΒΜΞΔΞΥΞαΓΦΞΖΞγΞσΛΥΆΜΙγΛΒΛΜΛκΞΔΞΉΞμΓΦΞΝΛάΓΘΝΑΫ–ΛΈ¥ΊάαΛΥ¬–ΛΖΛΤΒσΤΑΛ§≤ΟΛ®ΛιΛλΛκΛΈΛ«ΛœΛ Λ·ΓΛ…τΑΧΞΣΞ÷ΞΗΞßηλà ΨλΙγΛΥΛηΛΟΛΤΛœΞ≠ΞψΞιΞ·ΞΩΓΦΞβΞ«ΞκΝ¥¬ΈΓΥΛΥ¬°≈Ό ―≤ΫΛρΆΩΛ®ΛκΓΘ
ΓΓΛΩΛ»Λ®Λ–ΓΛΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΛΥΛηΛΟΛΤΤάΛιΛλΛΩ±ιΒΜΞ«ΓΦΞΩΛ«Ξ≠ΞψΞιΞ·ΞΩΓΦΛ§ΤΑΛΛΛΤΛΛΛκΨθ¬÷ΛΥ¬–ΛΖΓΛάΒΧΧΛΪΛιΗΰΛΪΛΛ…ςΛ§ΩαΛΛΛΤΛ≠ΛΩΨλΙγΓΛ βΙ‘±ιΒΜΞΔΞΥΞαΓΦΞΖΞγΞσΛΈ¬≠ΛρΤßΛΏΫ–ΛΙΤΑΛ≠ΛΥΞ÷ΞλΓΦΞ≠Λ§≥ίΛΪΛκΛ≥Λ»ΛρΝέΝϋΛ«Λ≠ΛκΛάΛμΛΠΓΘΚ«ΫΣ≈ΣΛΥΗ‘¥ΊάαΓΛΛ“ΛΕΓΛ¬≠ΦσΛ Λ…ΛΈ¥ΊάαΛΥΞ÷ΞλΓΦΞ≠Λ§≥ίΛΪΛκΛ≥Λ»ΛΥΛœΛ ΛκΛ§ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΛ»ΛΖΛΤΛΈ≈§Ά―άηΛœ¬άΛβΛβΓΛφζΓ ΛΙΛΆΓΥΛΈΛέΛΠΛΥΛ ΛκΛΈΛœΞΛΞαΓΦΞΗΛ«Λ≠ΛκΛœΛΚΛάΓΘ
ΓΓ3ΛΡΛαΛœΓ÷ConstrainsΓΉΓ ¬Ϊ«ϊΓΠΙ¥¬ΪΓΥΛάΓΘ
ΓΓΛ≥ΛΈΓ÷¬Ϊ«ϊΓΉΛ»ΛΛΛΠΞ≠ΓΦΞοΓΦΞ…Λœ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΥΛΣΛΛΛΤΛœΙ≠ΛΛ»œΑœΛΈΑ’ΧΘΛρΜΐΛΡΛ§ΓΛΑλΗάΛ«άβΧάΛΙΛκΛ»ΛΙΛλΛ–Γ÷ΤΑΛ≠ΛρΆόά©ΛΙΛκΆΉΝ«ΓΉΛ»ΛΛΛΠΛ≥Λ»ΛΥΛ ΛμΛΠΓΘ
ΓΓΛΩΛ»Λ®Λ–ΝΑΫ–ΛΈΓ÷ΛδΛιΛλ±ιΒΜΟφΓΉΛΈΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛ§ΓΛ«ΊΗεΛΈ …ΛΥ≈ωΛΩΛΟΛΤΛΛΛκΨθ¬÷ΛΈΜωΈψΛœΓΛΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛΈœ”ΛδέΰΥάΛ§ …ΛρΤΆΛ≠»¥Λ±Λ ΛΛΛηΛΠΛΥ≈ωΛΩΛξ»ΫΡξΛρΦηΛΟΛΩΛΠΛ®Λ«¬Ϊ«ϊΛρΆΩΛ®ΛΤΛΛΛκΙΞΈψΛάΛ»ΛΛΛ®ΛκΓΘ
ΓΓ≤ΦΛΈΤΑ≤ηΛœΞ≤ΓΦΞύΟφΛΈΦγΩΆΗχΛ§ΝάΛΟΛΩ≈®ΛρΕ·ά©≈ΣΛΥΑζΛ≠¥σΛΜΛκ…§ΜΠΒΜForce PullΛρ»·ΤΑΛΖΛΤΛΛΛκΆΆΛρ¬ΣΛ®ΛΩ≥Ϊ»·≤ηΧΧΛάΛ§ΓΛΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛ§ΛβΛ§Λ≠ΕλΛΖΛΏ¬≠ΛρΞ–ΞΩΛΡΛΪΛΜΛΤΛΛΛκΆΆΜ“Λ§ΗΪΛΤΦηΛλΛκΓΘ
 |
ΓΓΟμΑ’ΩΦΛ·ΗΪΛκΛ»Ξ–ΞΩΛΡΛΪΛΜΛΤΛΛΛκ¬≠Λ§ΓΛΟœΧΧΛΥΟ÷ΛΪΛλΛΩΒΓΚύ»ΔΛΥΨΉΤΆΛΖΛΤΛΫΛλΑ Ψε¬≠Λ§ΤΑΛΪΛ Λ·Λ ΛΟΛΤΛΛΛκΛΈΛ§ §ΛΪΛκΓΘΛόΛΩΓΛΛΫΛλΛάΛ±Λ«ΛœΛ Λ·ΓΛΒΓΚύ»Δ¬ΠΛβΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛΈΞ–ΞΩΛΡΛΪΛΜΛΩ¬≠ΛΈΨΉΤΆΈœΛ«ΤΑΛΛΛΤΛΛΛκΓΘΛ≥ΛΠΛΖΛΩ…ΫΗΫΛΥΛηΛΟΛΤΓΛΞ≤ΓΦΞύάΛ≥ΠΛ»Ξ≠ΞψΞιΞ·ΞΩΓΦΛ§ΝξΗΏΛΥ¥≥ΨΡΛΖΙγΛΟΛΤΛΛΛκΆΆΛ§≈ΝΛοΛξΓΛΛ“ΛΛΛΤΛœΞΉΞλΞΛΞδΓΦΛ§ΓΛΛ≥ΛΈΞ≤ΓΦΞύάΛ≥ΠΛ§Φ¬ΚίΛΥ¬©Λ≈ΛΛΛΤΛΛΛκάΛ≥ΠΛ ΛσΛάΛ»ΛΛΛΠΦ¬¥ΕΛρΤάΛκΛ≥Λ»ΛΥΛΡΛ Λ§ΛΟΛΤΛΛΛ·ΓΘ
ΓΓΛ ΛΣΓΛΤΑ≤ηΟφΓΛΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛΥΞΣΞλΞσΞΗΛΈΩΆ¬ΈΧœΖΩΛΈΛηΛΠΛ ΩΆΖΝΛ§Ϋ≈Λ ΛΟΛΤ…ΝΛΪΛλΛΤΛΛΛκΛ»ΜΉΛΠΛ§ΓΛΛ≥ΛλΛœΞβΓΦΞΖΞγΞσΞ≠ΞψΞΉΞΝΞψΛΥΛηΛΟΛΤΤάΛιΛλΛΩ±ιΒΜΞ«ΓΦΞΩΛάΛ±ΛΈΤΑΛ≠Λρ≤ΡΜκ≤ΫΛΖΛΩΛβΛΈΛΥΝξ≈ωΛΙΛκΓΘΛ ΛΈΛ«ΓΛΞΣΞλΞσΞΗΩßΛΈΩΆ¬ΈΞβΞ«ΞκΛΈΛέΛΠΛΈΤΑΛ≠ΛœΓΛΒΓΚύ»ΔΛΥΛαΛξΙΰΛσΛάΛξΛΖΛΤΛΛΛκΛΈΛ§ §ΛΪΛκΛάΛμΛΠΓΘΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛΈΤΑΛ≠Λ»ΞΣΞλΞσΞΗΩßΛΈΩΆ¬ΈΞβΞ«ΞκΛΈΤΑΛ≠Λ»ΛΈΚΙΛ≥ΛΫΛ§ΓΛΓ÷ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛ ΛΖ/ΛΔΛξΛΈΚΙΓΉΛ»ΛΛΛΠΆΐ≤ρΛ«ΛΛΛΛΓΘ
SWJFOΛΈ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛœNVIDIA PhysXΞΌΓΦΞΙ
ΓΓΛ ΛΣΓΛΥήΚνΛœΞ≤ΓΦΞύΞ®ΞσΞΗΞσΛΥEpic GamesΛΈΓ÷Unreal Engine4ΓΉΓ UE4ΓΥΛρΚΈΆ―ΛΖΛΤΛΛΛκΛ≥Λ»ΛβΛΔΛξΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσ…τ §Λœ¥πΥή≈ΣΛΥΛœNVIDIAΛΈPhysXΛρΆχΆ―ΛΖΛΤΛΛΛκΓΘ
ΓΓWaszakΜαΛ«ΛœΓΛΥήΚνΛΥΛΣΛ±ΛκPhysXΛΈ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΆ―ΛΈΞ―ΞιΞαΓΦΞΩάΏΡξΛΥΛΡΛΛΛΤΛβΗάΒΎΛΖΛΩΓΘPhysXΛ«ΛœΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖΉΜΜάΚ≈ΌΛρά©ΗφΛΙΛκΓ ΔβΖΉΜΜΛΈ»Ω…ϋ≤σΩτΛΥΝξ≈ωΛΙΛκΓΥΞ―ΞιΞαΓΦΞΩΛ»ΛΖΛΤΓ÷Position Solver Iteration CountΓΉΓ ΑΧΟ÷ΖΉΜΜ»Ω…ϋΩτΓΥΛ»Γ÷Velocity Solver Iteration CountΓΉΓ ¬°≈ΌΖΉΜΜ»Ω…ϋ≤σΩτΓΥΛ§ΛΔΛκΛ§ΓΛUE4˫˸ΫΒΩΞκΞ»ΟΆΛœΛœΛΫΛλΛΨΛλ8Λ»1Λ»Λ ΛΟΛΤΛΛΛκΓΘΛΖΛΪΛΖΓΛΥήΚνΛ«ΛœάΚ≈ΌΛρΨεΛ≤ΛκΧή≈ΣΛ«»φ≥”≈ΣΙβΛαΛΈ64Λ»32ΛράΏΡξΛΖΛΩΛ»ΛΖΛΤΛΛΛκΓΘ
ΓΓΛόΛΩΓΛΓ÷FrictionΓΉΓ ΥύΜΛΓΥΞ―ΞιΞαΓΦΞΩΓΛΓ÷RestitutionΓΉΓ »Ω»·ΓΥΞ―ΞιΞαΓΦΞΩΛœΡψΛαΛΈΟΆΛρΨθΕΖΛΥ±ΰΛΗΛΤάΏΡξΛΖΛΩΛ»ΛΖΛΤΛΛΛκΓΘΛΫΛΈΆΐΆ≥ΛœΓΛΙβΛΛΟΆΛάΛ»ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΛΈ±ΤΕΝ≈ΌΛ§ΛΠΛόΛ·Ζκ≤ΧΛΥ…ΫΛλΛ ΛΪΛΟΛΩΛΩΛαΛ»άβΧάΛΒΛλΛΩΓΘΛΒΛιΛΥ…§ΜΠΒΜΓ÷Force PullΓΉΛΥΜΌ«έΛΒΛλΛΩΞ≠ΞψΞιΞ·ΞΩΛœFrictionΞ―ΞιΞαΓΦΞΩΛœΞΦΞμΓ ΥύΜΛΛ ΛΖΓΥΛ»άΏΡξΛΖΛΩΛ»Λβ δ¬≠ΛΖΛΤΛΛΛΩΓΘ
ΓΓΛΫΛΖΛΤΓΛάΒ≥ΈΛ ΨΉΤΆ»ΫΡξΛρΟ¥ ίΛΙΛκΛΩΛαΛΈΓ÷Continuous collision detectionΓΉΓ CCDΓΥΛœΥήΚνΛ«ΛœΧΒΗζ≤ΫΛΖΛΩΛ»ΛΛΛΠΓΘΛΫΛΈΆΐΆ≥ΛœΓΛΛ≥ΛλΛρΆ≠Ηζ≤ΫΛΖΛΤΛΛΛκΛ»ΓΛΩΆ¬ΈΞβΞ«ΞκΛ Λ…ΛΈ¬Ω¥ΊάαΞ≠ΞψΞιΞ·ΞΩΓΦΞβΞ«ΞκΛΈ…τΑΧά©ΗφΛΥΛΣΛΛΛΤΓΛΞΔΞΥΞαΓΦΞΖΞγΞσΛ» ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΖκ≤ΧΛρΙγά°ΛΖΛΩΛ»Λ≠ΛΥΛΠΛόΛ·ΛΛΛΪΛ ΛΛΛ≥Λ»Λ§¬ΩΛΪΛΟΛΩΛΩΛαΛάΓΘΖκΕ…ΓΛΨΉΤΆ»ΫΡξΛΥΆμΛσΛά ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΥΛΡΛΛΛΤΛœΓΛCCDΛρΧΒΗζ≤ΫΛΖΛΩΛΠΛ®Λ«ΓΛΦΪΝΑΛΈΨΉΤΆ δ¥ΑΛΈΞΉΞμΞΑΞιΞύΞ≥ΓΦΞ…ΛρΦΪΚνΛΖΛΤ¬–±ΰΛΖΛΩΛ»ΛΛΛΠΓΘ
ΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛΈΒσΤΑΞΝΞεΓΦΞΥΞσΞΑ
ΓΓΛ≥Λ≥ΛΪΛιΛœΓΛΥήΚνΛ«Φ¬Ν©ΛΒΛλΛΩΓ÷ΜωΝΑά©ΚνΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛρΆΜΙγΛΒΛΜΛΩΜωΈψΓΉΛΈΩτΓΙΛρΓΛΨ“≤πΛΖΛΤΛΛΛ·Λ≥Λ»ΛΥΛΖΛηΛΠΓΘ
ΓΓΛόΛΚΛœΞΕΞ≥≈®ΛΈΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛ§ΛδΛιΛλΛΤΩαΛΟ»τΛ÷Ξ«ΞΙΞΔΞΥΞαΓΦΞΖΞγΞσΛάΓΘ
 |
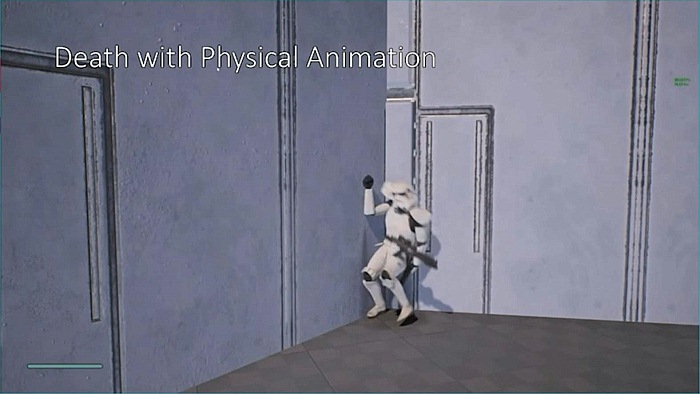
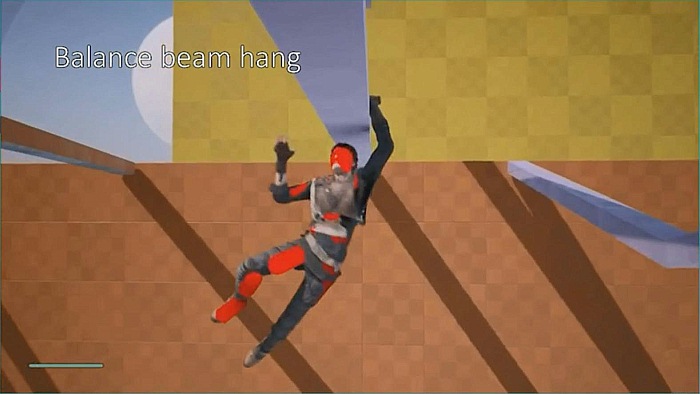
ΓΓΛ≥ΛΈΞΔΞΥΞαΓΦΞΖΞγΞσΛ«ΛœΓΛΝΑ»ΨΛΈœ”ΛρΩΕΛξ≤σΛΖΛ Λ§ΛιΓΛΛδΛδΛΣΛ…Λ±ΛΩ¥ΕΛΗΛ«ΩαΛΟ»τΛ÷ΤΑΛ≠ΛœΜωΝΑΛΥά©ΚνΛΒΛλΛΩΞβΓΦΞΖΞγΞσΞ«ΓΦΞΩΛ«Ξ≠ΞψΞιΞ·ΞΩΓΦΛρΤΑΛΪΛΖΛΤΛΛΛκΛάΛ±ΛάΛ§ΓΛΗε»ΨΛœΓΛΛΫΛΈΛόΛόΓΛΛΛΛοΛφΛκΧΎΕωΓ Λ«Λ·ΓΥΩΆΖΝΛΈΛ’ΛΟΛ»Λ” ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛ«ΛΔΛκRagdollΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΊΛ»άΎΛξ¥ΙΛ®ΛΤΛΛΛκΓΘ
ΓΓΛ≥ΛΈΜωΈψΛœΓΛΝΑ»ΨΛœΓ÷ΞΔΞΥΞαΓΦΞΖΞγΞσΚΤάΗΓΉΓΛΛΫΛΈΚ«ΗεΛΈΜ―άΣΛΪΛιΓ÷Ragdoll ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΓΉΛΥάΎΛξ¥ΙΛ®ΛΩΛβΛΈΓΛΛ»ΛΛΛΠΛ≥Λ»ΛΥΛ ΛκΓΘ
ΓΓΛ≥ΛλΛœΞΣΓΦΞΉΞσΞΙΞΎΓΦΞΙΛΈΞΖΓΦΞσΛ«ΛœΛΠΛόΛ·ΞœΞόΛκΛ§ΓΛ«ΊΗεΛΥ …Λ§ΛΔΛκΛ»ΛΣΛΪΛΖΛ Λ≥Λ»ΛΥΛ ΛΟΛΤΛ·ΛκΓΘΛΫΛλΛρ…ΫΛΖΛΩΛΈΛ§≤ΦΛΈΩόΛάΓΘ
 |
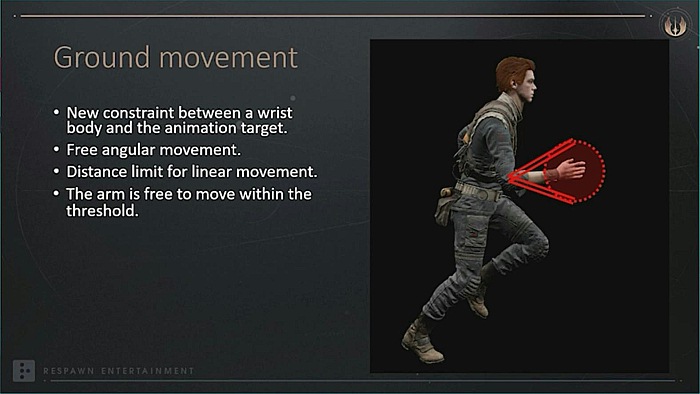
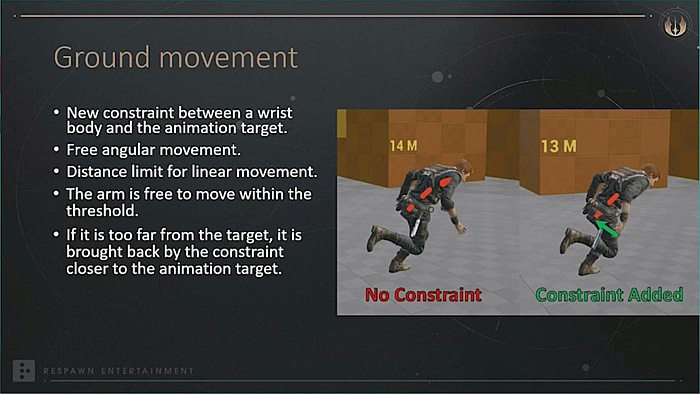
ΓΓ«ΊΗεΛΥ …Λ§ΛΔΛκΛ≥Λ»Λ«ΓΛ …Λ»ΛΈΨΉΤΆ»ΫΡξΛΥ«έΈΗΛΖΓΛΛΫΛλΑ ΨεΓΛ …ΛΈΤβ…τΛΥάχΛξΙΰΛύΛ≥Λ»ΛœΛ Λ·Λ ΛΟΛΤΛœΛΛΛκΛ§ΓΛΝΑ»ΨΛΈΓ÷ΩαΛΟ»τΛ”ΛΣΛ…Λ±ΞΔΞΥΞαΓΦΞΖΞγΞσΓΉΛΥΛΣΛΛΛΤΩΕΛξΨεΛ≤ΛΩΦξΛ§ …ΛΈΟφΛΥΛαΛξΙΰΛσΛ«ΛΖΛόΛΟΛΤΛΛΛΩΓΘΛόΛΩΓΛΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛ§ …ΛΥΖψΤΆΛΖΛ Λ§ΛιΨε»ΨΩ»ΛρΛ≠ΛξΛβΛΏ≤σ≈ΨΛΖΛΤΛΣΛξΛ ΛσΛ»Λβ…‘ΦΪΝ≥ΛάΓΘΓ÷Λ≠ΛξΛβΛΏΩαΛΟ»τΛ”ΓΉΛœΛΔΛκΡχ≈ΌΛΈΩαΛΟ»τΛ”ΒςΈΞΛ§ΛΔΛκΛΪΛιΛ≥ΛΫΒ·Λ≥ΛξΛ®ΛκΛβΛΈΛ«ΓΛ»τΒςΈΞΛ§ΞΦΞμΛ«ΛΫΛΈΨλΛ«Λ≠ΛξΛβΛΏ≤σ≈ΨΛΙΛκΛΈΛœ…‘ΦΪΝ≥Λ«ΛΔΛκΓΘ
ΓΓΛ≥ΛΠΛΖΛΩ…‘ΦΪΝ≥ΛΒΛΥ¬–ΫηΛΙΛκΛΩΛαΓΛΨΉΤΆΛρΗΓΟΈΛΖΛΩΚίΛΥΛœΞΙΞ»ΞΞΓΦΞύΞ»ΞκΓΦΞ―ΓΦΛΈΙχΛΥ¬Ϊ«ϊΛρΆΩΛ®ΛΤΓΛΨε»ΨΩ»Λ§…‘≈ωΛΥ≤σ≈ΨΛΖΛ ΛΛΆόά©ΛρΆΩΛ®ΛΤΛΛΛκΓΘΛΒΛιΛΥΓΛΩαΛΟ»τΛσΛάΩ»¬ΈΛΈΦΓΛΈΑΧΟ÷Λ§¬γΛ≠Λ· …Λρ±έΛ®ΛΤΛΖΛόΛΠΛέΛ…ΨΉΖβΛ§¬γΛ≠ΛΛΛ»»ΫΟ«Λ«Λ≠ΛΩΨλΙγΛœΓΛΛΫΛΈΜΰ≈άΛ«ΝΑ»ΨΛΈΜωΝΑά©ΚνΞΌΓΦΞΙΛΈΓ÷ΩαΛΟ»τΛ”ΛΣΛ…Λ±ΞΔΞΥΞαΓΦΞΖΞγΞσΓΉΛρ¬®ΜΰΟφΟ«ΛΖΓΛΛΫΛΈΨλΛΪΛιRagdollΞΖΞΏΞεΞλΓΦΞΖΞγΞσΜΌ«έ≤ΦΛΥΑήΙ‘ΛΒΛΜΛκΛ≥Λ»Λ»ΛΖΛΩΛΈΛάΓΘ
 |
ΓΓΖκ≤ΧΛ»ΛΖΛΤΛœΓΛΝΑ»ΨΛΈΓ÷ΩαΛΟ»τΛ”ΛΣΛ…Λ±ΞΔΞΥΞαΓΦΞΖΞγΞσΓΉΛΈΚΤάΗΛ«ΜœΛόΛκΛ»Λ≥ΛμΛœ ―ΛοΛιΛ ΛΛΛ§ΓΛΩ»¬ΈΛρ»ΨΩ»Λ“ΛΆΛΟΛΩΛ»Λ≥ΛμΛ«ΓΛΝΑΫ“ΛΖΛΩΛηΛΠΛ ά©ΗφΛ§ΤΰΛξΓΛΙχΚ’Λ±ΛΒΛ Λ§ΛιΛΥΟœΧΧΛΥΩ»¬ΈΛ§≈ίΛλΛκΤΑΛ≠Λ»Λ ΛΟΛΩΓΘΛΩΛΖΛΪΛΥΛΫΛΝΛιΛΈΛέΛΠΛ§≥ Ο ΛΥΦΪΝ≥ΛΥΗΪΛ®ΛκΓΘ
 |
ΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛΈΒσΤΑΞΝΞεΓΦΞΥΞσΞΑ
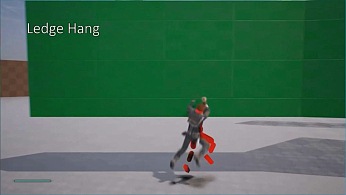
ΓΓWaszakΜαΛœ¬≥ΛΛΛΤΓΛΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΓ ΞΪΞκΓΠΞ±ΞΙΞΤΞΘΞΙΓΥΛΈΤΑΛ≠ά©ΗφΛΥœΟ¬ξΛρΑήΛΖΛΩΓΘ
ΓΓΦγΩΆΗχΛΥ¬–ΛΖΛΤΛβΓ÷ΜωΝΑά©ΚνΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛρΆΜΙγΛΒΛΜΛκΓΉΜ≈Ν»ΛΏΛρΦηΛξΤΰΛλΛΤΛœΛΛΛκΛ§ΓΛΨΉΤΆ¥ΊœΔΛΈάΒ≥Έά≠ΛηΛξΛβΓ÷ΗΪΛΩΧήΛ»ΛΖΛΤ≤ηΤΑΛ≠Λ§ΛΪΛΟΛ≥ΛηΛ·≥ξΛιΛΪΛΪΛ…ΛΠΛΪΓΉΛΥΛΡΛΛΛΤΫ≈Λ≠ΛρΟ÷ΛΛΛΤΚνΛξΙΰΛΏΛρΛΖΛΩΛ»ΛΈΛ≥Λ»ΓΘ
ΓΓ≤ΦΛœΓΛΦγΩΆΗχΛΥ¬–ΛΙΛκΤΑΛ≠ά©ΗφΛΈ¥πΥήΜωΈψΛ»ΛΖΛΤΦ®ΛΒΛλΛΩΛβΛΈΛάΓΘ
 ±οΛΊΛΈΛ÷Λι≤ΦΛ§ΛξΞΔΞ·ΞΖΞγΞσ |
 …ΛΊΛΈΛ÷Λι≤ΦΛ§ΛξΞΔΞ·ΞΖΞγΞσ |
ΓΓΛ≥ΛλΛœΓΛ≥≥Λ Λ…ΛΈ±οΛδ¥Ώ …ΛΥΡœΛόΛΟΛΤΛ÷Λι≤ΦΛ§ΛξΨθ¬÷Λ«≤ΘΑήΤΑΛΙΛκΒσΤΑΛΥΛ ΛκΛ§ΓΛœ”ΛΈΤΑΛ≠Λœ¥ΑΝ¥ΛΥΜωΝΑά©ΚνΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛρΚΤάΗΛΖΛΤΛΛΛκΛβΛΈΛΥΛ ΛκΓΘΛΫΛλΑ ≥ΑΛΈ…τΑΧΓΛΛΩΛ»Λ®Λ–ΤΙ¬ΈΛ Λ…ΛΈ≤Φ»ΨΩ»ΛδΒ”…τΛ Λ…ΛœΓΛΒ’ΛΥ¥ΑΝ¥ΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈά©Ηφ≤ΦΛΥΟ÷ΛΛΛΩΒσΤΑά©ΗφΛ»ΛΖΛΩΓΘ
ΓΓΟμΑ’ΩΦΛ·ΗΪΛκΛ»ΓΛΛ≥ΛλΛόΛΩΞΣΞλΞσΞΗΛΈΩΆ¬ΈΧœΖΩΛΈΛηΛΠΛ 3DΞβΞ«ΞκΛΈΜ―Λ§ΗΪΛ®±ΘΛλΛΖΛΤΛΣΛξΓΛΛ≥ΛλΛœΓΛΦγΩΆΗχΛΥάΏΡξΛΒΛλΛΩΓ÷Λ÷Λι≤ΦΛ§ΛξΨθ¬÷ΛΈ¥πΥήΜ―άΣΓΉΛρ…ΫΛΖΛΤΛΛΛκΓΘΛ≥ΛΈΞΣΞλΞσΞΗΛΈΩΆ¬ΈΧœΖΩΛΈΜ―άΣΛΈ ΐΛρ¥―ΜΓΛΙΛκΛ»ΓΛΛΫΛΈΛ“ΛΕΛœΕ Λ§ΛξΓΛΛΫΛΈΕ Λ≤≥―Λ§ΛέΛήΗ«Ρξ≤ΫΛΒΛλΛΤΛΛΛκΛΈΛ§ §ΛΪΛκΓΘΛ≥ΛΈΓ÷¬≠Ε Λ≤Μ―άΣΓΉΛ§Λ÷Λι≤ΦΛ§ΛξΞΔΞ·ΞΖΞγΞσΜΰΛΈ¥πΥήΜ―άΣΛ ΛΈΛάΛμΛΠΓΘ
ΓΓ¬–ΛΖΛΤΓΛΛ÷Λι≤ΦΛ§ΛξΑήΤΑΛδ»τΛ”ΛΡΛ≠ΞΔΞ·ΞΖΞγΞσΛρΛΙΛκΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛΈΛέΛΠΛρ¥―ΜΓΛΙΛκΛ»ΓΛΛ“ΛΕΛΈΕ Λ§ΛΟΛΩ¥πΥήΜ―άΣΛΈΛόΛόΓΛ≤Φ»ΨΩ»Λ§Λ÷ΛιΛξΛ÷ΛιΛξΛ»Ά…ΛλΛΤΛΛΛκΛΈΛ§ΗΪΛ®ΛκΓΘΛ≥ΛΈ≤Φ»ΨΩ»ΛδΒ”…τΛΈΆ…ΛλΛœΓΛΛΫΛΠΛΖΛΩΞΔΞ·ΞΖΞγΞσΛΈΚίΛΥ»·άΗΛΖΛΩ¥Ζά≠ΞβΓΦΞαΞσΞ»ΛΈ±ΤΕΝΛ§≈§Ά―ΛΒΛλΛΤΛΛΛκΛΩΛαΛάΓΘ
ΓΓΛ≥ΛΈΫ–Άη±«Λ®ΛΥΦξ±ΰΛ®ΛρΤάΛΩ≥Ϊ»·ΞΝΓΦΞύΛάΛΟΛΩΛ§ΓΛΛΙΛΌΛΤΛΈΦγΩΆΗχΞΔΞ·ΞΖΞγΞσΛ§Λ≥ΛΈΦ¬ΝθΞΔΞΉΞμΓΦΞΝΛ«ΛΠΛόΛ·ΛœΛΛΛΪΛ ΛΪΛΟΛΩΓΘ
ΓΓΛΩΛ»Λ®Λ–ΦγΩΆΗχΛΈΞΙΞιΞΛΞ«ΞΘΞσΞΑΞΔΞ·ΞΖΞγΞσΛρ¬ΣΛ®ΛΩΤΑ≤ηΛ«ΛœΓΛΝΑΫ–ΛΈΓ÷Λ÷Λι≤ΦΛ§ΛξΑήΤΑΓΉΛ»Τ±ΛΗΛ«ΓΛΓ÷œ”ΛρΙ≠Λ≤ΛΩΟφΙχΜ―άΣΓΉΛΈ¥πΥήΜ―άΣΛΥ¬–ΛΖΓΛΚΗ±Π ΐΗΰ≈Ψ¥ΙΛρΙ‘ΛΟΛΩΚίΛΈ¥Ζά≠ΞβΓΦΞαΞσΞ»ΛΈ±ΤΕΝΛδΓΛΨψ≥≤ ΣΛΪΛιΛΈΨΉΖβΛρΦγΩΆΗχΞβΞ«ΞκΛΥ≈§Ά―ΛΖΛΩΛάΛ±ΛΈΛβΛΈΛάΓΘΛ≥ΛλΛœΛ ΛσΛάΛΪΓ÷ΛδΛΗΛμΛΌΛ®ΩΆΖΝΓΉΛΈΛηΛΠΛΥ≤αΨξΛΥΞ’ΞιΞ’ΞιΛΖΛΤΛΛΛΤ…‘ΦΪΝ≥ΛάΛΟΛΩΓΘ
 |
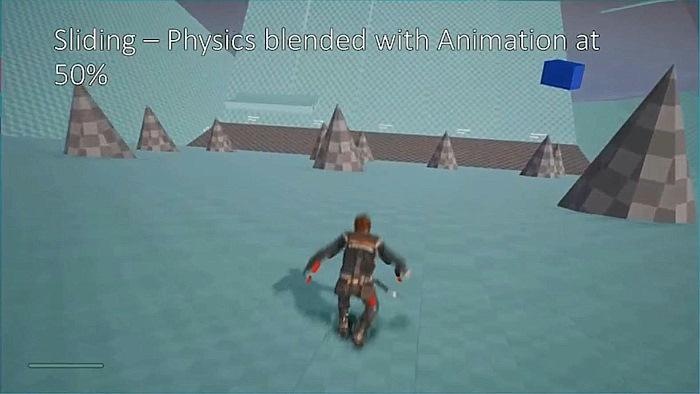
ΓΓΛ≥ΛλΛΥ¬–ΫηΛΙΛκΛΌΛ·ΓΛ≥Ϊ»·ΞΝΓΦΞύΛœΜνΛΖΛΥΓΛ¥ΊάαΛΈΞΗΞγΞΛΞσΞ»ΕνΤΑΛΈΡώΙ≥ΟΆΛρΨεΛ≤ΛΤΛΏΛΩΛ»Λ≥ΛμΓΛΚΘ≈ΌΛœΒ’ΛΥΙ≈ΛΛΤΑΛ≠Λ»Λ ΛξΓΛ…‘ΦΪΝ≥Λ ΑθΨίΛΥΛœ ―ΛοΛξΛ§Λ ΛΪΛΟΛΩΓΘΆ…ΛλΛΥΛ·Λ·ΛΙΛκΛΩΛαΛΥ¥ΊάαΛΥΡώΙ≥ΛρΤΰΛλΛΤΛΏΛΩΛ§ΓΛΚΘ≈ΌΛœΙ≈Λ·Λ ΛξΓΛάΗΛ≠ ΣΛΟΛίΛΒΛ§Λ Λ·Λ ΛΟΛΩΛΈΛάΓΘ
ΓΓΛΫΛ≥Λ«ΓΛ≥Ϊ»·ΞΝΓΦΞύΛ§ΜνΛΖΛΩΛΈΛœΓΛ¥ΊάαΛΈΞΗΞγΞΛΞσΞ»ΕνΤΑΛΈΡώΙ≥ΟΆΛρΗΒΛΈΓ÷ΛδΛΗΛμΛΌΛ®ΩΆΖΝΓΉΛΥΧαΛΖΛΩΛΠΛ®Λ«ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΛΈ≈§Ά―≥δΙγΛρ50ΓσΛΥΗΚ¬ύΛΒΛΜΛκΞΔΞΉΞμΓΦΞΝΛάΛΟΛΩΓΘ
 |
ΓΓΛΩΛΖΛΪΛΥΓΛΛ≥ΛλΛ«¥ΊάαΛΈΞΗΞγΞΛΞσΞ»ΕνΤΑΛΈΡώΙ≥ΟΆΛρΨεΛ≤ΛΩΛ»Λ≠ΛΈΙ≈ΛΛΤΑΛ≠Λ»ΛœΑέΛ ΛΟΛΤΗΪΛ®ΛκΛηΛΠΛΥΛ ΛΟΛΩΓΘ¥Ζά≠ΞβΓΦΞαΞσΞ»ΛΈ±ΤΕΝΛδΨΉΖβΛΪΛιΛΈ±ΤΕΝΛœΦθΛ±ΛδΛΙΛΛΒσΤΑΛΥΛœΛ ΛΟΛΤΛΛΛκΛ§ΓΛΛΫΛΈΑ“ΈœΛœΦεΛ·ΓΛΓ÷ΤΑΛ≠ΛΈΆΨ±ΛΓΉΛΈΦΐ¬ΪΛβΝαΛΛΓΘ
ΓΓΛ≥ΛΈΓ÷ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛρ50ΓσΗΚ¬ύΛΒΛΜΛκΓΉΛ»ΛΛΛΠΛΈΛœΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛΥ¬–ΛΖΛΤΓΛΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛ§Γ÷œ”ΛρΙ≠Λ≤ΛΩΟφΙχΜ―άΣΓΉΛΈΛόΛόΤßΛσΡΞΛΟΛΤ¬―Λ®ΛΤΛΛΛκΛ»ΛΛΛΠΛηΛΠΛ Α’ΧΘΙγΛΛΛΥΛ ΛΟΛΤΛΛΛκΛηΛΠΛάΓΘΛΫΛΠ≤ΨΡξΛΖΛΩΛΠΛ®Λ«ΤΑ≤ηΛρΗΪΡΨΛΙΛ»ΓΛΛΩΛΖΛΪΛΥΛΫΛσΛ ¥ΕΛΗΛΥΗΪΛ®ΛΤΛ·ΛκΓΘ
ΓΓΛΝΛ ΛΏΛΥΓΛΛ≥ΛλΛœΞΜΞΟΞΖΞγΞσΤβΛ«ΗλΛιΛλΛΩΨπ σΛ«ΛœΛ ΛΛΛ§ΓΛΦ¬ΛœΛ≥ΛΈΞΔΞΉΞμΓΦΞΝΓΛΛΪΛΡΛΤΛΈPS2Μΰ¬εΛΈΧΨΚνΞ≤ΓΦΞύΓ÷ΞοΞσΞάΛ»ΒπΝϋΓΉΛΈΦγΩΆΗχΛΈΞ≠ΞψΞιΞ·ΞΩΓΦΞΔΞ·ΞΖΞγΞσΛΥΚΈΆ―ΛΒΛλΛΩΛβΛΈΛάΛΟΛΩΛξΛΙΛκΓΘΛ≥ΛΈΕωΝ≥Λœ»σΨοΛΥΕΫΧΘΩΦΛΛΓΘ
ΓΓΛ ΛΣΓΛΦ¬ΚίΛΈΞ≤ΓΦΞύΟφΛΈ±«ΝϋΛ«ΛœΓΛΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΞβΞ«ΞκΛΪΛιΛœΛΏΫ–ΛΖΛΤΗΪΛ®ΛκΞΣΞλΞσΞΗΩßΛΈΩΆ¬ΈΞβΞ«ΞκΛœΓΛΈψΛΥΛηΛΟΛΤ¥πΥήΜ―άΣΛρ…ΫΛΖΛΤΛΛΛκΓΘΨΉΖβΛΈΨ·Λ ΛΛΨθ¬÷Λ«ΛœΞΣΞλΞσΞΗΩßΛΈΩΆ¬ΈΞβΞ«ΞκΛ«…ΫΛΒΛλΛκ¥πΥήΜ―άΣΛ»ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΪΛιΛΈ±ΤΕΝΛρ≈§Ά―ΛΖΛΩΦγΩΆΗχΞβΞ«ΞκΛ»ΛΈΚΙΑέΛ§Ψ·Λ ΛΛΛ≥Λ»Λ§ΗΪΛΤΦηΛλΛκΓΘ
 |
ΓΓWaszakΜαΛΥΛηΛκΛ»Λ≥ΛΈΓ÷ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤Χ≈§Ά―≥δΙγΛρΗΚΨ·ΛΒΛΜΛκΓΉΦξΥΓΛœΓΛΛΪΛ ΛξΙ≠ΛΛ»œΑœΛ«±ΰΆ―Λ«Λ≠ΛΩΛΫΛΠΛάΓΘΛΩΛάΓΛΛΫΛΈΗΚ¬ύ≥δΙγΛœΦγΩΆΗχΛΈΞΔΞ·ΞΖΞγΞσΛ¥Λ»ΛΥΡ¥άΑΛ§…§ΆΉΛάΛ»ΛβΩΕΛξ ÷ΛΟΛΤΛΛΛκΓΘ
ΓΓΛΩΛ»Λ®Λ–Ξ·ΞιΞΛΞΏΞσΞΑΞΔΞ·ΞΖΞγΞσΛ«ΛœΓΛΛ≥ΛΈΤΑΛ≠ΛΥΛΡΛΛΛΤΛœΓΛΜωΝΑά©ΚνΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛΥ¬–ΛΖΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ≈ΌΛœ40ΓσΛ»ΛΖΛΩΛ»ΛΛΛΠΓΘ
 |
ΓΓWaszakΜαΛœΛ≥ΛλΑ ≥ΑΛΥΓΛΗΰΛΪΛΛ…ςΛΈΑ“ΈœΛœ45ΓσΓΛΞμΓΦΞΉΛΈΨεΛξ≤ΦΛξΛΈΚίΛΈ¥Ζά≠ΞβΓΦΞαΞσΞ»ΛΈ±ΤΕΝΛœ40ΓσΛ»άΏΡξΛΖΛΩΛ≥Λ»Λρ σΙπΛΖΛΩΓΘ
 ΗΰΛΪΛΛ…ςΛΈΟφΛ«ΛΈ βΙ‘ΞΔΞ·ΞΖΞγΞσ |
 ΞμΓΦΞΉΛΊΛΈΛ÷Λι≤ΦΛ§Λξ/ΛηΛΗ≈–ΛξΛΈΞΔΞ·ΞΖΞγΞσ |
ΓΓΈ¬ΛΥ¬–ΛΙΛκ"ΛΠΛσΛΤΛΛ"ΞΔΞ·ΞΖΞγΞσΛ«ΛœΓΛ≈ωΫιΛœ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ≈ΌΛρ50ΓσΛ»ΛΖΛΤάΏΡξΛΖΛΤΛΛΛΩΓΘ
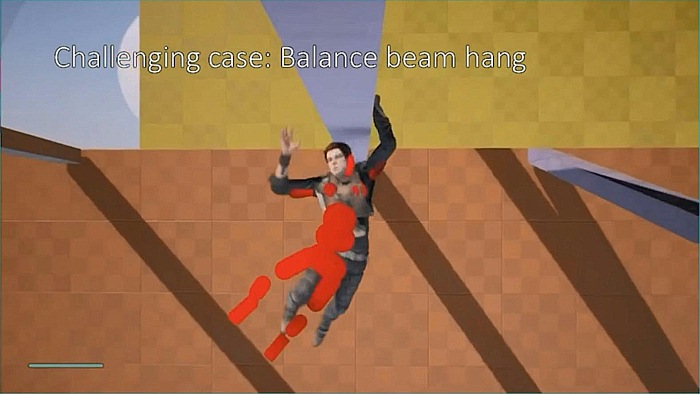 |
ΓΓΛ≥ΛλΛœΛ≥ΛλΛ«Έ…ΛΒΛΫΛΠΛ ΒΛΛβΛΖΛΩΛΈΛάΛ§ΓΛ≥Ϊ»·ΞΝΓΦΞύΛΪΛιΛœΓΛΛΝΛγΛΟΛ»Γ÷ΤΑΛ≠Λ§ΛδΛΪΛόΛΖΛΙΛ°ΛκΓΉΛ»ΛΛΛΠ…Ψ≤ΝΛ§≤ΦΛΒΛλΛΩΛ»ΛΛΛΠΓΘΛΩΛΖΛΪΛΥΤΑΛ≠Λ»ΛΖΛΤΨε≤ΦΛΈΧωΤΑΛ§¬γΛ≠Λ·ΓΛΞ≥ΞΏΞΪΞκΛΙΛ°ΛκΑθΨίΛ§ΛΔΛκΓΘ
ΓΓΛΫΛ≥Λ«ΓΛΈ¬ΛΥ¬–ΛΙΛκ"ΛΠΛσΛΤΛΛ"ΞΔΞ·ΞΖΞγΞσΛ«ΛœΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ≈ΌΛρ50ΓσΛ»ΛœΛΙΛκΛβΛΈΛΈΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ¬–ΨίΛρΓ÷ΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛΈΙχΛάΛ±ΓΉΛΥΗ¬ΡξΛΙΛκΙ©…ΉΛρΤΰΛλΛΩΛΫΛΠΛάΓΘ
 |
ΓΓΛ≥ΛλΛΥΛηΛξΓΛΨε»ΨΩ»ΛΈΧωΤΑΛ§ΛΪΛ ΛξΆόΛ®ΛιΛλΤΑΛ≠Λ§ΞΙΞύΓΦΞΚΛ»Λ ΛξΓΛΛΪΛΟΛ≥ΛηΛΒΛ§Ϋ–ΛΤΛ≠ΛΤΛΛΛκΓΘΛΫΛλΛ«ΛΛΛΤ≤Φ»ΨΩ»ΛΈ¥Ζά≠ΞβΓΦΞαΞσΞ»ΛΈ±ΤΕΝΛœΛΫΛλΛ ΛξΛΥΫ–ΛΤΛΛΛκΛΈΛ«ΧωΤΑ¥ΕΛœΛΫΛ≥ΛΫΛ≥ΛΥ¥ΕΛΗΛιΛλΛκΓΘ
ΓΓ βΙ‘/ΝωΙ‘ΞΔΞ·ΞΖΞγΞσΛΥΛΡΛΛΛΤΛœΓΛΝωΛξΫ–ΛΖΓΛΡδΜΏΓΛ ΐΗΰ≈Ψ¥ΙΛΈΞΔΞ·ΞΖΞγΞσΜΰΛΥΛœΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ≈ΌΛρ40ΓσΛ»ΛΖΛΤάΏΡξΛΖΛΩΓΘΒ’ΛΥ βΙ‘ΟφΛδΝωΙ‘ΟφΛΈΞΔΞΥΞαΓΦΞΖΞγΞσΛΥ¬–ΛΖΛΤΛœ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ≈ΌΛρΞΦΞμΛ»ΛΖΛΩΓΘΛ≥ΛλΛœΓ÷≈§Ά―ΛΈ…§ΆΉά≠Λρ¥ΕΛΗΛ ΛΪΛΟΛΩΓΉΛΩΛαΛ»άβΧάΛΒΛλΛΤΛΛΛκΓΘ
ΓΓΦ¬ΚίΛΈΞΤΞΙΞ»ΞΖΓΦΞσΛ«ΛΈΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛΈ βΙ‘ΓΛΝωΙ‘ΛΈΤΑΛ≠ΛΈΆΆΜ“Λρ≥Έ«ßΛΙΛκΛ»ΓΛΛΩΛΖΛΪΛΥΝωΛξΫ–ΛΖΓΛΡδΜΏΓΛ ΐΗΰ≈Ψ¥ΙΜΰΛΥΛœΓΛ¥Ζά≠ΞβΓΦΞαΞσΞ»ΛΈ±ΤΕΝΛ«ΓΛœ”Λ§ΛΑΛκΛσΛ»ΩΕΛξ≤σΛΒΛλΛκΆΆΛ§ΗΪΛΤΦηΛλΛκΓΘΛ≥ΛΈΤΑ≤ηΛ«ΛβΞΣΞλΞσΞΗΛΈΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛ§Ϋ≈ΛΆΙγΛοΛΜΛιΛλΛΤΛΛΛκΛ§ΓΛΝωΛξΫ–ΛΖΓΛΡδΜΏΓΛ ΐΗΰ≈Ψ¥ΙΜΰΛΥΓΛ¬γΛ≠Λ ΛΚΛλΛ§≥Έ«ßΛ«Λ≠ΛκΓΘΛ≥ΛλΛœΛΡΛόΛξΓΛΛΫΛΠΛΖΛΩΞΩΞΛΞΏΞσΞΑΛ«Λœ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛ§¬γΛ≠Λ·Ϋ–ΛΤΓΛΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛ»ΛΈΞΚΞλΛ§Ϋ–ΛΤΛΛΛκΛ»ΛΛΛΠΛ≥Λ»Λ«ΛΔΛκΓΘ
 |
 |
 |
ΓΓΛ≥ΛΈΨθ¬÷Λ«ΓΛΫΫ §Λ Ξ·ΞΣΞξΞΤΞΘΛ«ΛœΛΔΛΟΛΩΛ§ΓΛΞΤΞΙΞ»ΛρΫ≈ΛΆΛΤΛΛΛ·Λ»ΓΛΤΟΡξΛΈΨθΕΖ≤ΦΛ«Λœ…‘ΦΪΝ≥ΤΑΛ≠Λ§Ϋ–ΛΤΛΖΛόΛΠΛ≥Λ»Λ§»·≥–ΛΖΛΩΛ»ΛΛΛΠΓΘ
ΓΓΛΩΛ»Λ®Λ–ΓΛΩΆ¥÷Λœ βΙ‘/ΝωΙ‘ΤΑΚνΛΈΛ»Λ≠ΓΛΤßΛΏΫ–ΛΖΛΩ¬≠Λ»ΛœΒ’¬ΠΛΈΦξΛ§ΝΑΛΥΫ–ΛκΛηΛΠΛ ΤΑΛ≠Λ§ΦΪΝ≥Λ»Λ ΛκΓΘΛ≥ΛλΛ§ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛρ≈§Ά―ΛΖΛΩΖκ≤ΧΛ»ΛΖΛΤΓΛΤ±ΛΗ¬ΠΛΈ¬≠Λ»ΦξΛ§ΕΠΛΥΝΑΛΥΫ–ΛΩΛξΓΛΑζΛΟΙΰΛσΛ«ΛΖΛόΛΠΛηΛΠΛ ΤΑΛ≠ΛΥΛ ΛΟΛΤΛΖΛόΛΠΛ≥Λ»Λ§ΛΖΛ–ΛΖΛ–ΗΪΛιΛλΛΩΛ»ΛΛΛΠΛΈΛάΓΘ
ΓΓΛ≥ΛΈ…‘ΕώΙγΛΥ¬–ΛΖΛΤΛœΓΛΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΞβΞ«ΞκΛΈ≥Τ¥ΊάαΛΥ¬–ΛΖΓΛ¬Ϊ«ϊΛρΆΩΛ®ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ»œΑœΛΈΆόά©ΛρΙ‘ΛΠΛ≥Λ»Λ«¬–ΫηΛΖΛΩΓΘΛ≥ΛΈΆόά©Λ«ΓΛΞΌΓΦΞΙΛ»Λ Λκ βΙ‘/ΝωΙ‘ΛΈΞβΓΦΞΖΞγΞσΛΪΛι¬γΛ≠Λ·ΑοΟΠΛΙΛκΛηΛΠΛ Φξ¬≠ΛΈΩΕΛξ ΐΛΥΛ ΛιΛ ΛΛΛηΛΠΛΥΛΖΛΩΛ»ΛΛΛΠΛοΛ±ΛάΓΘ
 |
 |
ΓΓΛ≥ΛλΛ»Τ±ΆΆΛΈά©ΗφΛœΓΛΈ¬ΛΈΨεΛρ βΛ·Ξ–ΞιΞσΞΙΞΠΞ©ΓΦΞ·ΛΈΞΔΞ·ΞΖΞγΞσΛΈΚίΛΈœ”ΛΈΤΑΛ≠ΛΈά©ΗφΛΥΛβΚΈΆ―ΛΒΛλΛΩΓΘ
 |
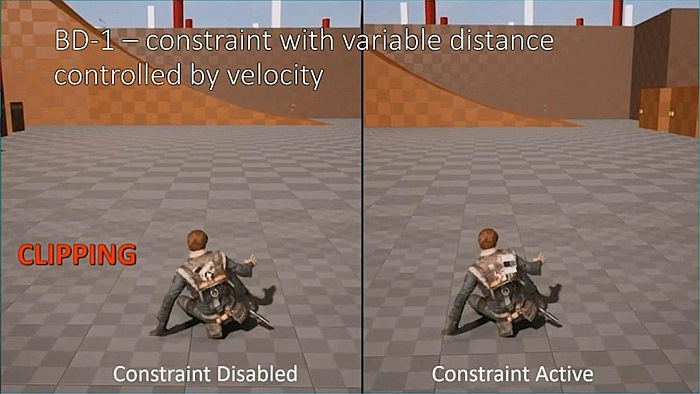
«ΊΟφΛΥΛ·ΛΟΛΡΛΛΛΩΝξΥάΞ…ΞμΞΛΞ…Γ÷BD-1ΓΉΛΈΒσΤΑΛΥΛΡΛΛΛΤ
ΓΓ¬≥ΛΛΛΤΓΛWaszakΜαΛœΓΛΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛΈ«ΊΟφΛΥΡΞΛξ…’ΛΛΛΤΓΛΥΝΗ±ΛρΫθΛ±ΛΤΛ·ΛλΛκΞΣΞΩΞΙΞ±ΞμΞήΓ Ξ…ΞμΞΛΞ…ΓΥΛΈBD-1ΛΈΤΑΛ≠ΛΥΛΡΛΛΛΤΛΈ≤ράβΛβΙ‘ΛΟΛΩΓΘ
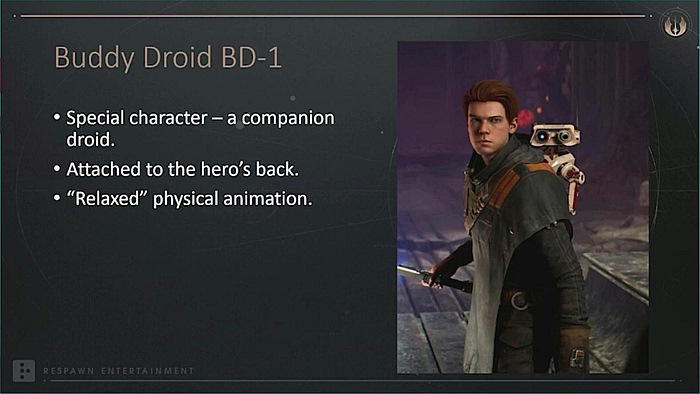 |
ΓΓBD-1ΛΈ≤Φ»ΨΩ»…τ §ΛœΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛΈΚΤάΗΛΈΛΏΛΈΤΑΛ≠Λ«ΓΛΨε»ΨΩ»Λ»Τ§…τΛ§ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛάΛ±Λ«ΤΑΛ≠Λ§…’Λ±ΛιΛλΛΤΛΛΛκΛ»ΛΛΛΠΓΘ
ΓΓΛΡΛόΛξΓΛΞΉΞλΞΛΞδΓΦΛΈΝύΚνΛΥΙγΛοΛΜΛΤ≤‘ΤΑΛΙΛκBD-1ΛΈΤΑΛ≠ΛœΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛάΛ±Λ«ΤΑΛ≠ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝΛœΛ ΛΖΛ»ΛΖΓΛ βΙ‘/ΝωΙ‘ΓΛΛΫΛΈ¬ΨΛΈΞΗΞψΞσΞΉΞΔΞ·ΞΖΞγΞσΛ Λ…ΛΥΛηΛΟΛΤάίΤΑΛΒΛΜΛιΛλΛκBD-1ΛΈΤ§…τΛΈΞ÷ΞκΞ÷ΞκΛ»ΛΖΛΩΤΑΛ≠ΛœΓΛΛ≥ΛλΛόΛΩΒ’ΛΥ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈ±ΤΕΝ100ΓσΛ«ΤΑΛΪΛΖΛΩΛ»ΛΈΛ≥Λ»ΛάΓΘΆΉΛΙΛκΛΥBD-1ΛΈΨε»ΨΩ»ΛδΤ§…τΛœΓΛ¥πΥήΜ―άΣΛδ±ιΒΜΞβΓΦΞΖΞγΞσΛΈΛ ΛΛΞΛΞδΞξΞσΞΑΛδΞ≠ΓΦΞΝΞßΓΦΞσΛ Λ…ΛΈΛηΛΠΛ ΞΔΞ·ΞΜΞΒΞξΈύΛΥΕαΛΛΑΖΛΛΛ»Λ ΛΟΛΤΛΛΛκΛοΛ±ΛάΓΘ
ΓΓΛΩΛάΓΛΦγΩΆΗχΛΈΤΑΛ≠Λ§ΖψΛΖΛΛΛ»ΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤Χ100ΓσΛ«ΤΑΛ≠Λρ…’Λ±ΛΤΛΛΛκBD-1ΛΈΤ§…τΛ§ΖψΛΖΛ·ΤΑΛ≠ΛΙΛ°ΛΤ…‘ΦΪΝ≥ΛΥΛ ΛξΓΛΛ≥ΛλΛΥ¬–ΫηΛΙΛκ…§ΆΉΛ§Ϋ–ΛΤΛ≠ΛΩΛΫΛΠΛάΓΘ
ΓΓΛΫΛΈ¬–ΫηΛ»ΛœΓΛΈψΛΥΛηΛΟΛΤ¬Ϊ«ϊΛρΆΩΛ®ΛκΛ≥Λ»ΛΥΛ ΛκΛΈΛάΛ§ΓΛΛΫΛΈ¬Ϊ«ϊΛΈΆΩΛ® ΐΛœΓ÷ΛδΛδΞΔΞκΞ¥ΞξΞΚΞύ≈ΣΓΉΛ»Λ ΛΟΛΤΛΛΛκΓΘ
ΓΓΛΫΛλΛœΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖκ≤ΧΓ÷BD-1ΛΈΤ§…τΛΈΒσΤΑΞΙΞ‘ΓΦΞ…Λ§ΟΌΛΛΛ»Λ≠ΛœΓΛΤ§…τΛΈΑήΤΑ»œΑœΛρ»φ≥”≈ΣΙ≠Λ·ΒωΆΤΓΉΛΖΓΛΒ’ΛΥΓ÷ΒσΤΑΞΙΞ‘ΓΦΞ…Λ§¬°ΛΛΛ»Λ≠ΛœΤ§…τΛΈΑήΤΑ»œΑœΛρΨ°ΛΒΛ·ΛΙΛκΓΉΛ»ΛΛΛΠΛβΛΈΛάΓΘΛόΛΔΓΛΛ≥ΛλΛβΓΛBD-1ΛΈΒΛΜΐΛΝΛΥΛ ΛκΛ»ΓΛΤ§…τΛ§ΟΌΛ·Ά…ΛλΛκΛ»Λ≠ΛœΒΛΛρ»¥ΛΛΛΤΆ…ΛλΛΥΩ»Λρ«ΛΛΜΓΛΤ§…τΛ§¬°Λ·ΤΑΛΛΛΤΛΖΛόΛΛΛΫΛΠΛ Λ»Λ≠ΛœΓΛΤΑΛΪΛ ΛΛΛηΛΠΛΥ¥°Λ®ΛκΛ»ΛΛΛΟΛΩΛηΛΠΛ Α’ΜΉΛΈ»Ω±«Λ»ΙΆΛ®ΛιΛλΛ Λ·ΛβΛ ΛΛΛΪΛβΛΖΛλΛ ΛΛΓΘ
 |
ΓΓΚΗ¬ΠΛΈ¬Ϊ«ϊΞαΞΪΞΥΞΚΞύΛ ΛΖΛΈΨλΙγΛœΓΛBD-1ΛΈΤ§…τΛ§¥ΑΝ¥ΛΥΦγΩΆΗχΞ≠ΞψΞιΞ·ΞΩΓΦΛΈ«ΊΟφΛΥάχΛξΙΰΛσΛ«ΛΖΛόΛΟΛΤΛΛΛκΓΘΛ≥ΛλΛΥ¬–ΛΖΓΛ±Π¬ΠΛΈ¬Ϊ«ϊΞαΞΪΞΥΞΚΞύΛΔΛξΛΈΨλΙγΛœΛΫΛλΛ§ΆόΛ®ΛιΛλΛΤΛΛΛκΓΘ
ΓΓΛΒΛΤΓΛBD-1ΛΈΒσΤΑά©ΗφΛΥΛœΓΛΛ≥ΛΠΛΖΛΩΙ©…ΉΑ ≥ΑΛΥΛβΛΛΛ·ΛΡΛΪΛΈΚΌΛΪΛΛΡ¥άΑΛ§…§ΆΉΛΥΛ ΛΟΛΩΛ»WaszakΜαΛœΫ“ΛΌΛκΓΘ
ΓΓΛόΛΚΓΛBD-1ΛœΓΛΦγΩΆΗχΛΈ«ΊΟφΛΥΙγ¬ΈΛΖΛΤΛΛΛκΛ»Λ≠ΛΥΛœ ΩΨοΞΒΞΛΞΚΛΈ85ΓσΛΥΫΧΨ°ΛΒΛλΛκΛΈΛάΛ»ΛΛΛΠΓΘΛόΛΓΓΛΛ≥ΛλΛœΓ÷Ξ≤ΓΦΞύ≈ΣΛ ±ιΫ–ΓΉΛ»ΛΛΛΠΛ≥Λ»ΛάΛμΛΠΓΘ
ΓΓΛΫΛΖΛΤΓ÷ΦγΩΆΗχΛΈ«ΊΟφΛΥΛ·ΛΟΛΡΛΛΛΤΛΛΛόΛΙΓΉΛ»ΛΛΛΠάΏΡξΨεΓΛΛΫΛΈ ΣΆΐΒσΤΑΛœΓΛΦγΩΆΗχΛΈΤΑΛ≠ΛΥœΔΤΑΛΙΛκΛ≥Λ»ΛΥΛ ΛκΛΈΛάΛ§ΓΛΤΟΡξΛΈΨθΕΖ≤ΦΛ«Γ÷ΛΫΛΈœΔΤΑ¥ΕΓΉΓ ΛΛΛοΛ–Αλ¬Έ¥ΕΓΥΛ§Λ°Λ≥ΛΝΛ Λ·ΓΛΞ–ΞιΞ–ΞιΛΥΤΑΛΛΛΤΛΛΛκΛηΛΠΛ ΑθΨίΛΥΛ ΛκΛ≥Λ»Λ§ΛΔΛξΓΛ≥Ϊ»·ΞΝΓΦΞύΛœΛ≥ΛΈΨ…ΨθΛΊΛΈ¬–ΚωΛρΙ‘ΛΟΛΩΓΘ
ΓΓΛΫΛΈ¬–ΚωΛ»ΛœΓΛΛόΛΚΓΛ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΦ¬Ν©ΛρΓ÷ΦγΩΆΗχΆ―ΓΉΛ»Γ÷BD-1Ά―ΓΉΛ»ΛΥάΎΛξ §Λ±ΓΛΚ«ΫιΛΥΦγΩΆΗχΆ― ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛρΖΉΜΜΛΖΓΛΛΫΛΈΦΓΛΥBD-1Ά― ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛρΖΉΜΜΛΙΛκΫγΫχΛ»ΛΖΛΩΓΘBD-1ΛœΛΛΛοΛ–ΓΛΦγΩΆΗχΛΈ…’Ωο ΣΛ»ΛΖΓΛBD-1ΛΈΦΓΛΈΤΑΛ≠ΛœΓΛΦγΩΆΗχΛΈ ΣΆΐΒσΤΑΛΈ±ΤΕΝΛρΦθΛ±ΛκΛ»ΛΙΛκΛ§ΓΛBD-1ΛΈΤΑΛ≠Λ§ΦγΩΆΗχΛΥΛœ±ΤΕΝΛρΆΩΛ®Λ ΛΛΛ»ΛΛΛΠ¥ΊΖΗά≠ΛΈ±ιΜΜΞ―ΞΛΞΉΞιΞΛΞσΛΥΛΖΛΩΛΈΛάΓΘ
ΓΓΛΖΛΪΛβΓΛΛΫΛλΛΨΛλΛΈ ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΖΉΜΜΛœΓΛ…Ν≤ηΓ Δβ…ΫΦ®ΓΥΞ’ΞλΓΦΞύΞλΓΦΞ»Λ»ΛœΤ»Έ©ΛΖΛΩΓΛΛΔΛιΛΪΛΗΛαάΏΡξΛΖΛΩΗ«ΡξΞΒΞΛΞ·ΞκΛ«Ι‘ΛΛΓ ΛΩΛ»Λ®Λ–30fpsΓΥΓΛΥηΞ’ΞλΓΦΞύΛœΙ‘ΛοΛ ΛΛΓΘ…Ν≤ηΓ Δβ…ΫΦ®ΓΥΞ’ΞλΓΦΞύΞλΓΦΞ»Λ§ΙβΛΛΨλΙγΓ ΛΩΛ»Λ®Λ–60fpsΛδ120fpsΛ Λ…ΓΛΛΔΛκΛΛΛœΛΫΛΈ≤Ρ ―Ξ’ΞλΓΦΞύΞλΓΦΞ»ΓΥΛœΓΛΑλ»÷Κ«ΕαΛΥΙ‘ΛΟΛΩ ΣΆΐΒσΤΑΛΈ±ιΜΜΖκ≤ΧΛΪΛι δ¥÷ΛΖΛΤΒαΛαΛιΛλΛΩΤΑΛ≠Λ«¬εΙ‘ΛΙΛκΛ≥Λ»Λ»ΛΖΛΩΓΘ
ΓΓΛ≥ΛΈΙ©…ΉΛΥΛηΛξΓΛBD-1ΛœΦγΩΆΗχΛΈΤΑΛ≠ΛΥΩΦΛ·œΔΤΑΛΖΛΡΛΡΑ¬ΡξΛΖΛΩ ΣΆΐΒσΤΑΛρΛΙΛκΛηΛΠΛΥΛ ΛΟΛΩΛ»ΛΈΛ≥Λ»ΛάΓΘ
ΓΓΥήΚνΛΈΒσΤΑά©ΗφΛΈ¥πΥή ΐΩΥΛ»ΛΖΛΤΛœΓΛΓ÷ΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛ» ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΓΉΛΈΙγά°ΛρΙ‘ΛΠΛ≥Λ»Λ«ΓΛΞ≠ΞψΞιΞ·ΞΩΓΦ±ιΒΜΛΥΓΛ¬©Λ≈Λ·Ξ≤ΓΦΞύάΛ≥ΠΛ»ΛΈΑλ¬Έ¥ΕΛρΆΩΛ®ΛκΛ≥Λ»ΛρΧήΜΊΛΙΓΉΛ»ΛΛΛΠΛβΛΈΛάΛΟΛΩΛ§ΓΛΟ±ΑλΛΈΦ¬ΝθΦξΥΓΛ«ΛœΛΠΛόΛ·Ι‘ΛΪΛΚΓΛΛΒΛόΛΕΛόΛ ΨθΕΖ≤ΦΓΛά©Ηφ¬–ΨίΛΈΦο ΧΓΛ≥ΤΞ≠ΞψΞιΞ·ΞΩΓΦΛΈΞΔΞ·ΞΖΞγΞσΓΛΞ≤ΓΦΞύΞαΞΪΞΥΞ·ΞΙΛ»ΛΈ≈‘ΙγΛ Λ…ΛΥ±ΰΛΗΛΤΓΛΚΌΛΪΛΛ¬–±ΰΛδΙ©…ΉΛ§…§ΆΉΛάΛΟΛΩΛ»ΛΛΛΠΛΈΛ§ΥήΞΜΞΟΞΖΞγΞσΛΈΝμ≥γΛ»ΛΛΛΠΛ≥Λ»ΛΥΛ ΛκΛάΛμΛΠΓΘ
ΓΓΞ≤ΓΦΞύΞΑΞιΞ’ΞΘΞΟΞ·ΞΙΛΥΗ¬ΛιΛΚΓΛ≤ηΝϋΓΛ±«ΝϋΛ»ΛΛΛΠΞαΞ«ΞΘΞΔΛœΓΛΚ«ΫΣ≈ΣΛ άΫ… Λ»ΛΖΛΤΞξΞξΓΦΞΙΛΙΛκΝΑΛΥΛΒΛόΛΕΛόΛ Ρ¥άΑΛρΙ‘ΛΠΛοΛ±ΛάΛ§ΓΛΓ÷ΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛ» ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΙγά°ΓΉΛ»ΛΛΛΠΆΉΝ«ΛβΓΛΛΫΛΈΓ÷Ρ¥άΑΓΉΞΤΓΦΞόΛΥΒσΛ§ΛκΛηΛΠΛΥΛ ΛΟΛΤΛ≠ΛΩΓΘΛΫΛσΛ Λ≥Λ»Λ§ΗΪΛ®ΛΤΛ≠ΛΩΞΜΞΟΞΖΞγΞσΛάΛΟΛΩΛηΛΠΛΥΛβΜΉΛΠΓΘΥΝΤ§Λ«ΛβΫ“ΛΌΛΩΛηΛΠΛΥΓΛΚΘΗεΛΈΞ≤ΓΦΞύΛ«ΛœΓ÷ΞΉΞλΞΛΞδΓΦΛρΞ≤ΓΦΞύάΛ≥ΠΛΥΑζΛ≠ΙΰΛύΛΈΛΥΫΫ §Λ άβΤάΈœΛΈΛΔΛκΤΑΛ≠ΓΉΛ§ΒαΛαΛιΛλΛΤΛΛΛκΛάΛ±ΛΥΓΛΛ≥ΛΠΛΖΛΩΚνΛξΙΰΛΏΛœΛ…ΛσΛ…ΛσΫ≈ΆΉΛΥΛ ΛΟΛΤΛ·ΛκΛœΛΚΛ«ΛΔΛκΓΘ
ΓΓΜΉΛ®Λ–ΓΛΑ ΝΑΛœΓΛΛΫΛΠΛΖΛΩ ΣΆΐΒσΤΑΛΥ«έΈΗΛΖΛΩΞΔΞΥΞαΓΦΞΖΞγΞσΛΈΚνΛξΙΰΛΏΛœΓΛΞ≤ΓΦΞύΛΥ≈§ΛΖΛΩ ΣΆΐΞ®ΞσΞΗΞσΛΈ≥Ϊ»·ΛΪΛιΦηΛξΝ»ΛόΛ Λ±ΛλΛ–Λ ΛιΛΚΓΛΒΜΫ―Τώ≈ΌΛ§ΙβΛΪΛΟΛΩΓΘΛΖΛΪΛΖΓΛΚ«ΕαΛœΓΛΆΞΛλΛΩ ΣΆΐΞ®ΞσΞΗΞσΛ§ΆχΆ―Λ«Λ≠ΛκΞ≤ΓΦΞύΞ®ΞσΞΗΞσΛ§Ω»ΕαΛΥΛ ΛΟΛΤΛ≠ΛΤΛΛΛκΛΩΛαΓ ΛΫΛΠΛΖΛΩΕα¬εΞ≤ΓΦΞύΞ®ΞσΞΗΞσΛρΆχΆ―ΛΖΛΤΞ≤ΓΦΞύ≥Ϊ»·ΛρΙ‘ΛΠΨλΙγΛΥΗ¬ΛΟΛΤΛœΓΥΓΛΞΔΞΛΞ«ΞΘΞΔΛ»Φξ¥÷ΛάΛ±Λ«ΞφΞΥΓΦΞ·ΛΪΛΡάβΤάΈœΛΈΙβΛΛΤΑΛ≠ΛρΞ≠ΞψΞιΞ·ΞΩΓΦΛΥ…’Λ±ΛκΛ≥Λ»Λ§Λ«Λ≠ΛκΛηΛΠΛΥΛ ΛΟΛΩΓΘΓ÷UE4ΓΏPhysXΓΉΛ«ΚνΛξΙΰΛόΛλΛΩΥήΚνΛœΓΛΛόΛΒΛΥΛΫΛΈΙΞΈψΛάΛΟΛΩΛ»ΗάΛ®ΛκΛΪΛβΛΖΛλΛ ΛΛΓΘ
ΓΓΥήΚνΛœάΛ≥Π≥ΤΙώΛΈΞαΞ«ΞΘΞΔΛΈΓ÷Game Of The YearΓΉΛΈΞΈΞΏΞΆΓΦλà SXSW Gaming Awards 2020Λ Λ…ΓΥΓΛΛΔΛκΛΛΛœΦθΨόΓ Titanium Awards 2019Λ Λ…ΓΥΛρ≤ΧΛΩΛΖΛΤΛΣΛξΓΛΝ¥»Χ≈ΣΛΥ…Ψ≤ΝΛ§ΙβΛΛΛΈΛ«ΓΛΛόΛάΧΛΞΉΞλΞΛΛΈΩΆΛœΓΛΛΦΛ“Λ»ΛβΡ©άοΛΖΛΤΛΏΛηΛΠΓΘΚΘ≤σΦηΛξΨεΛ≤ΛΩΒΜΫ―ΞΤΓΦΞόΓ÷ΜωΝΑά©ΚνΞΔΞΥΞαΓΦΞΖΞγΞσΛ» ΣΆΐΞΖΞΏΞεΞλΓΦΞΖΞγΞσΛΈΙγά°ΓΉΛΥΟεΧήΛΖΛΤΞΉΞλΞΛΛΖΛΤΛΏΛκΛ»ΛΒΛιΛΥ≥ΎΛΖΛαΛκΛœΛΚΛάΓΘΛΝΛ ΛΏΛΥΓΛ2020«·8ΖνΜΰ≈άΛ«EA OriginΞΙΞ»ΞΔΛ ΛιΛ–»Ψ≥έΛΈ4752±ΏΛ«ΙΊΤΰΛ«Λ≠ΛκΓΘ
